第1章:数式で考える回転機 センサレス制御①
2023.03.20

センサレス制御①
第1回:gd推定座標系の回路方程式
gd推定座標系がdq座標系に対してDqだけ遅れているとする。
dq⇒gdの変換行列は、

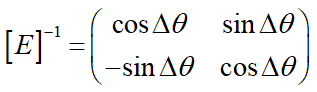
dq⇒gdの逆変換行列は、
また、

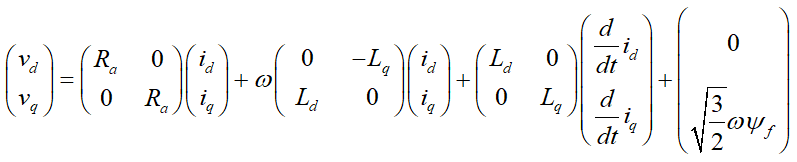
dq座標系の回路方程式は、
誘起電圧オブザーバを用いたセンサレス制御では、2Dqの項が消えるようにするために非突極機限定であるが、ここでは突極機も対象としているので、2Dqの項が出ないように回路方程式を変形する。
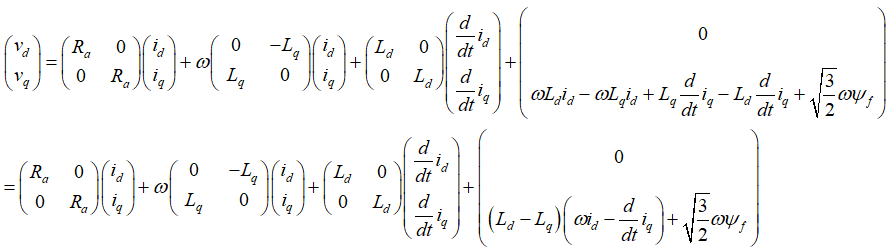
右辺の最終項が拡張誘起電圧項である。
拡張誘起電圧を用いたdq座標系の回路方程式は、

両辺に左から[E]を掛け算し、gd座標系の回路方程式を作る。
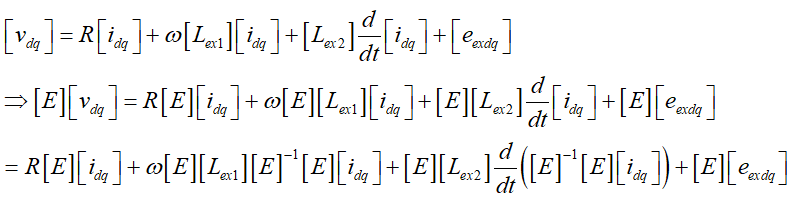
整理すると、

以上より、拡張誘起電圧を用いたgd推定座標系の回路方程式は、以下のように表すことができる。
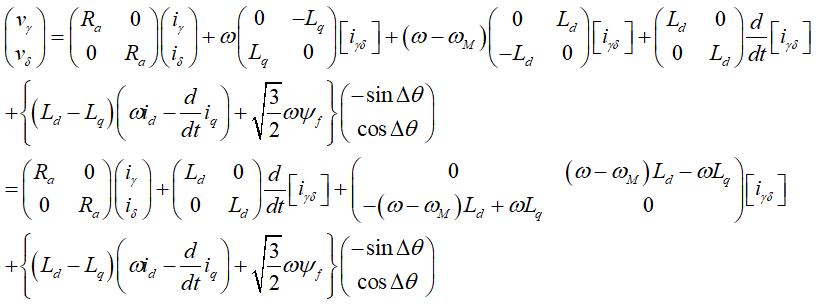
極対数をpとすると、

これは、近似を一切用いずに表したgd推定座標系の回路方程式である。
