第1章:数式で考える回転機 力行と回生②
2023.04.17

力行と回生②
第2回:dq座標系での考え方
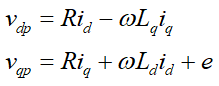
第1象限運転時は、
第4象限運転時に同じトルクを得るためには、idはそのままでiqの符号を反転させればよいので、

以上のd軸、q軸の電圧方程式から、
![]()
![]()
第4象限運転時の回転速度-トルク特性は、第1象限運転時の折り返しではない。
また、d軸電流がゼロであれば、
![]()
![]()
したがって、同じ回転速度であれば、回生時には力行時より小さい電圧で同じ電流を得ることができる。これは、第4象限運転では、少なくとも力行時の回転速度-トルク特性の折り返しを出力可能であることを表している。
なお、第4象限運転を行うことで、電力を電源へ回生できる可能性がある。モータのコイルから電源を見れば、インバータが昇圧回路になっているので、PWM制御により第4象限運転を行うことで、モータの誘起電圧が自動的に昇圧される。ここで、電源電圧以上に昇圧された場合のみ、回生運転となる。これは、低速で誘起電圧が小さい場合には、昇圧しても電源電圧以上にならず、回生運転にはならないことを表している。この場合、電源電流は第1象限運転の向きと同じで、電源の電力を使って第4象限運転をしていることになる。
電気エンジニアにおすすめ!! 計測器検索.com