第1章:数式で考える回転機 回転速度-トルク特性①
2022.12.26

回転速度-トルク特性①
第1回:UVW座標系における特性計算 その1
Y結線の3相PMモータの回転速度-トルク特性を求める。ここでは、インダクタンスはロータ位置によらず、一定とする(突極性はない)。
電源電流をI0、直流抵抗側の抵抗はゼロとすると、インバータへの入力電圧Vinは
![]()
中性点を基準に考えると、各相の電圧実効値は、
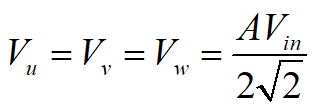
ここで、電圧利用率が100%の場合は
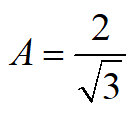
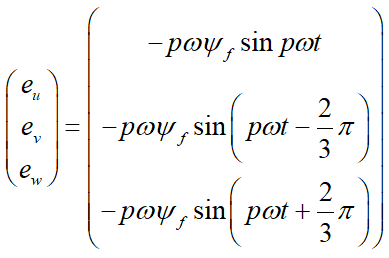
各相の誘起電圧実効値をEu、Ev、Ewとする。
モータの誘起電圧定数Keは3相分の値なので、1相に換算するとKe/3となる。

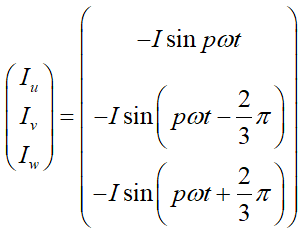
U相電流の実効値Iuを求める。
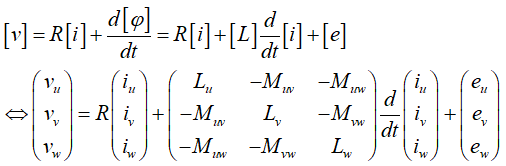
モータの回路方程式は、
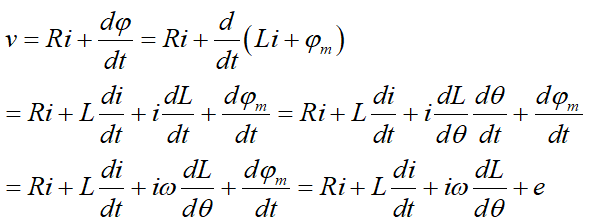
多相モータなので行列表記をすると

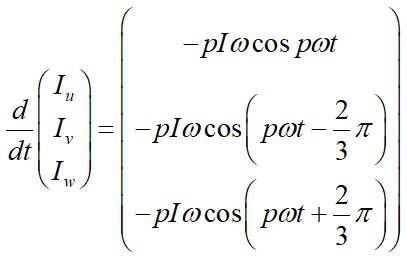
インダクタンスがロータ位置によって変化しないと仮定しているので、
ここで、
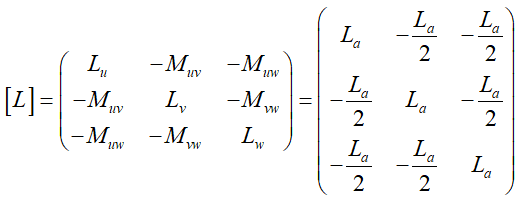
また、インダクタンス行列は、

ロータ位置によって変化しないと仮定しているのでLas=0となり、漏れインダクタンスがないとすると
以上より、回路方程式からU相を抽出すると、

ここで、q=pwt
誘起電圧位相と電流位相を一致させるベクトル制御をする場合を考えているので、U相の電圧位相は右辺の定数で変化する。

この式をベクトル図で表す。(実効値ではなく、振幅で大きさを表している。
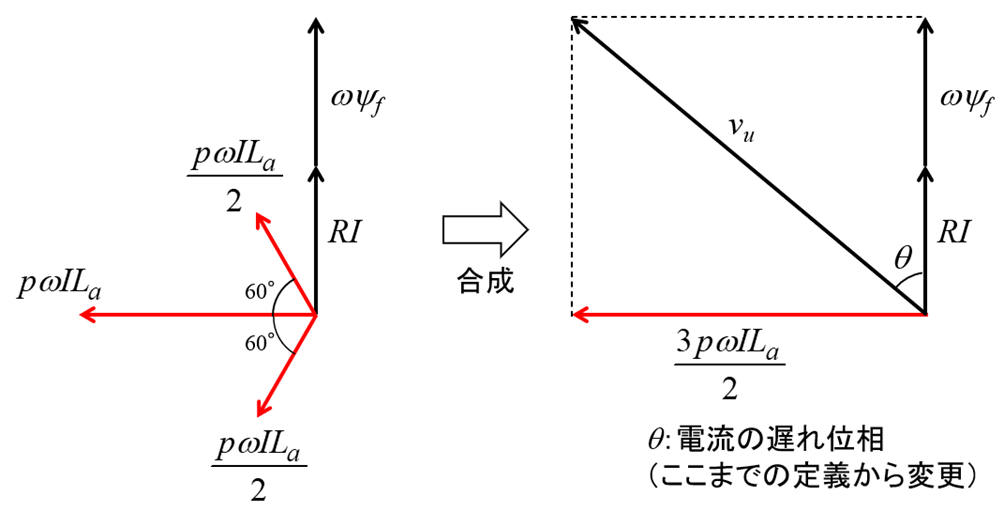
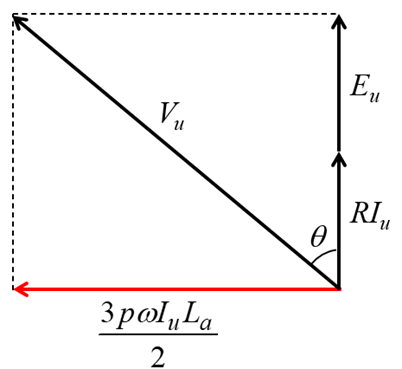
以上より、U相の電圧ベクトル図は
無効電力を生む3La/2は、U相の自己インダクタンスと相互インダクタンスの合成成分である。
したがって、U相インダクタンスLuとおける。
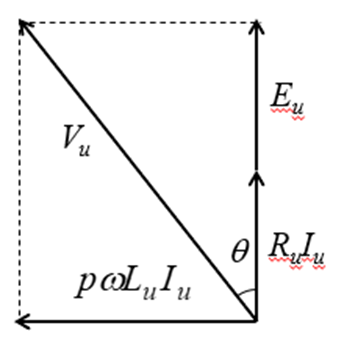
これがU相の電圧ベクトル図である。
電気エンジニアにおすすめ!! 計測器検索.com